1. Classical Planning
Classical Planning
State Model
- Finite and discrete state space
- a known initial state
- a set of goal states
- actions applicable in each
- a deterministic transition function for
- positve action cost
Goals states can be more than one
Search Algorithm
- b: maximal branching factor
- d: goal depth
- m: the maximal depth reached
Breadth First Search Data structure: FIFO (Queue)
Breadth First Search explores node level by level, and a queue (FIFO) allows nodes to be processed in the order that they are discovered, which ensures all nodes at a given depth are expanded before moving to the next level.
Depth first Search
Data structure: LIFO (Stack)
Depth FiRst Search explores as deep as possible along each branch before backtracking, and a stack (LIFO) enables this by always processing the most recently discovered node that still has unexplored successors.
Uniform Cost Search
Data structure: Priority Queue
Uniform Cost Search expands nodes based on t6he lowest cumulaitve cost, and a priority queue efficiently retrieves the node with the minimal cost at each step, allowing UCS for finding the optimal path.
| DFS | BFS | ID | A* | HC | IDA* | |
|---|---|---|---|---|---|---|
| Complete | No | Yes | Yes | Yes | No | Yes |
| Optimal | No | Yes* | Yes* | Yes | No | Yes |
| Time | ||||||
| Space |
A search algorithm is considered complete if it guarantees to find a solution, if one exists.
BFS and IDS are optimal only all nodes (edges) has equal costs(uniform).
Astar Search
: The actual cost from the initial state to the current state
: The heuristic value from the current state to goal state
Actual optimal value from current state s to goal state
Property of heuristic
- Admissble: never over-estimate. If for all
- Safe: for all
- Goal aware: for all
- Consistent:
consistent + goal aware admissible
admissible goal aware + safe
Optimality for A star search
- A star search without re-open mechanism requires both consistent and admissible to ensure finding an optimal path.
- With re-open mechanism, it only requies admissible
Example for a non-optimal solution by inconsistent but adimissble for A* search without re-open nodes.
(8)
A
/ \
+1 / \ +3
/ \
B ----- C ----- D
(7) +1 (0) +6 (0)
Reference: Why does A* with admissible non consistent heuristic find non optimal solution?
Greedy best-first search
- Using priority queue expand node by h(s)
- Completeness: For safe heuristic, Yes
- Optimality: No
STRIPS And Relaxation
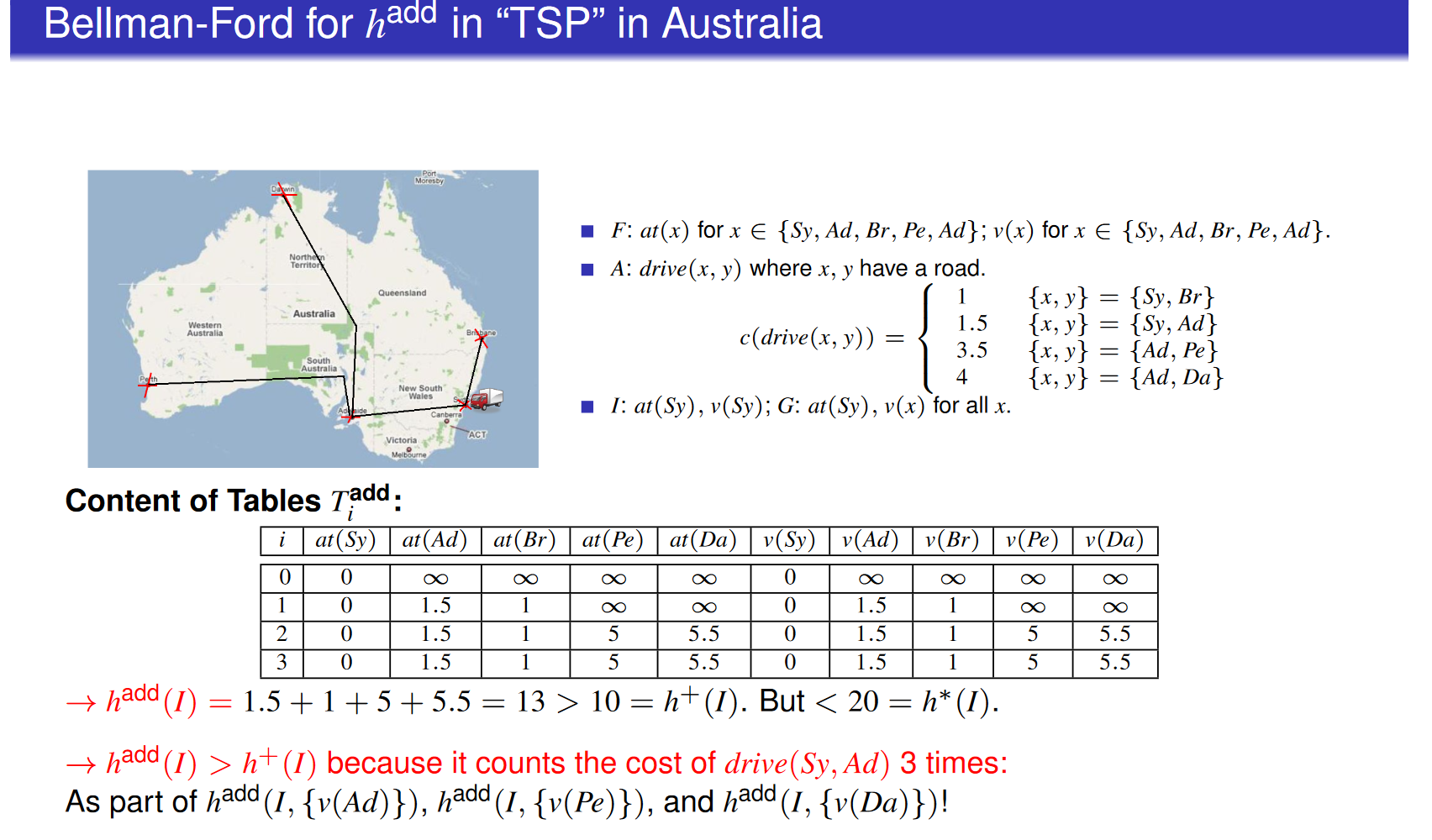
A STRIPS problem P = : Propositions, Initial state, Goal, Actions.
h+: The Optimal Delete Relaxation Heuristic
Default STRIP model: s' = s + add(s) - del(s)
after delete relaxation: s' = s + add(s)
Defination
如果目标大于1: 等于每个小目标的 之和
Defination
如果目标大于1: 等于每个小目标的 的最大值
和 :如果一个动作有多个precondition,则视为多个g:
Bellman-Ford Table
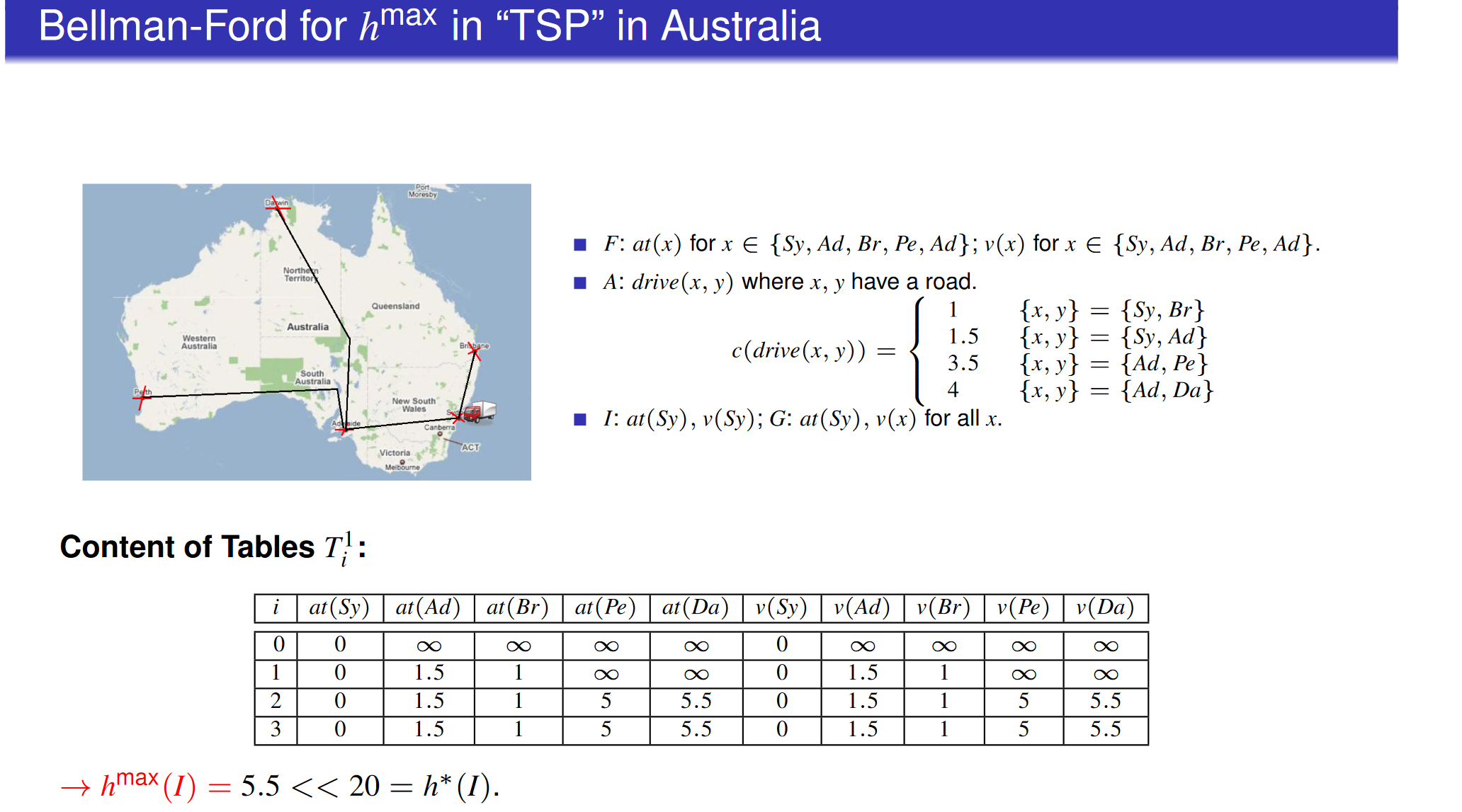
-
is admissible, but is typically far too optimistic
-
is not admissible, but is typically a lot more informed than
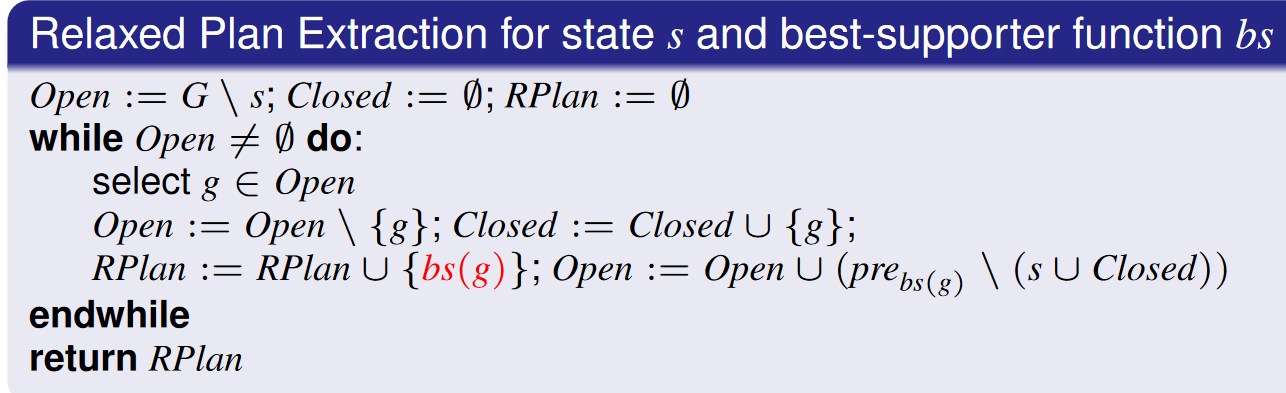
Relaxed Plan Extraction
A heuristic function is called a relaxed plan heuristic, denoted , if, given a state , it returns if no relaxed plan exists, and otherwise returns where is the action set returned by relaxed plan extraction on a closed well-founded best-supporter function for .
- Plan set means no duplicate actions.
- never over count sub plans due to
- may be inadmissible, just like , but for more subtle reasons.
- In practice, typically does not over-estimate
For relaxed plan extraction to make sense, it requires a closed well-founded best-supporter function:
The supporter function:
The supporter function:
Proposition : ( is Pessimistic and Agrees with on ). For all STRIPS planning tasks , for all states, if and only if . There exists STRIPS planning tasks and so that .
Width-based search
novelty w(s)