What is a POS tagging?
- a label assigned to a word in a sentence indicate its grammatical role.
Assumptions that go into a Hidden Markov Model
- Markov assumption: The current state (POS tag) depends only on the previous state.
- Output independence:The obserced word depends only on the current state(tag), not on other words or states.
- Stationary Transition and emission probabilities do not change over time.
Time complexity of the Viterbi algorithm
O(T×N2) where:
T = length of the sequence (number of words)
N = number of possible tags
Its practical for POS tagging since the number of tags (N) is small (N < 50 for most languages)
Example
Answer
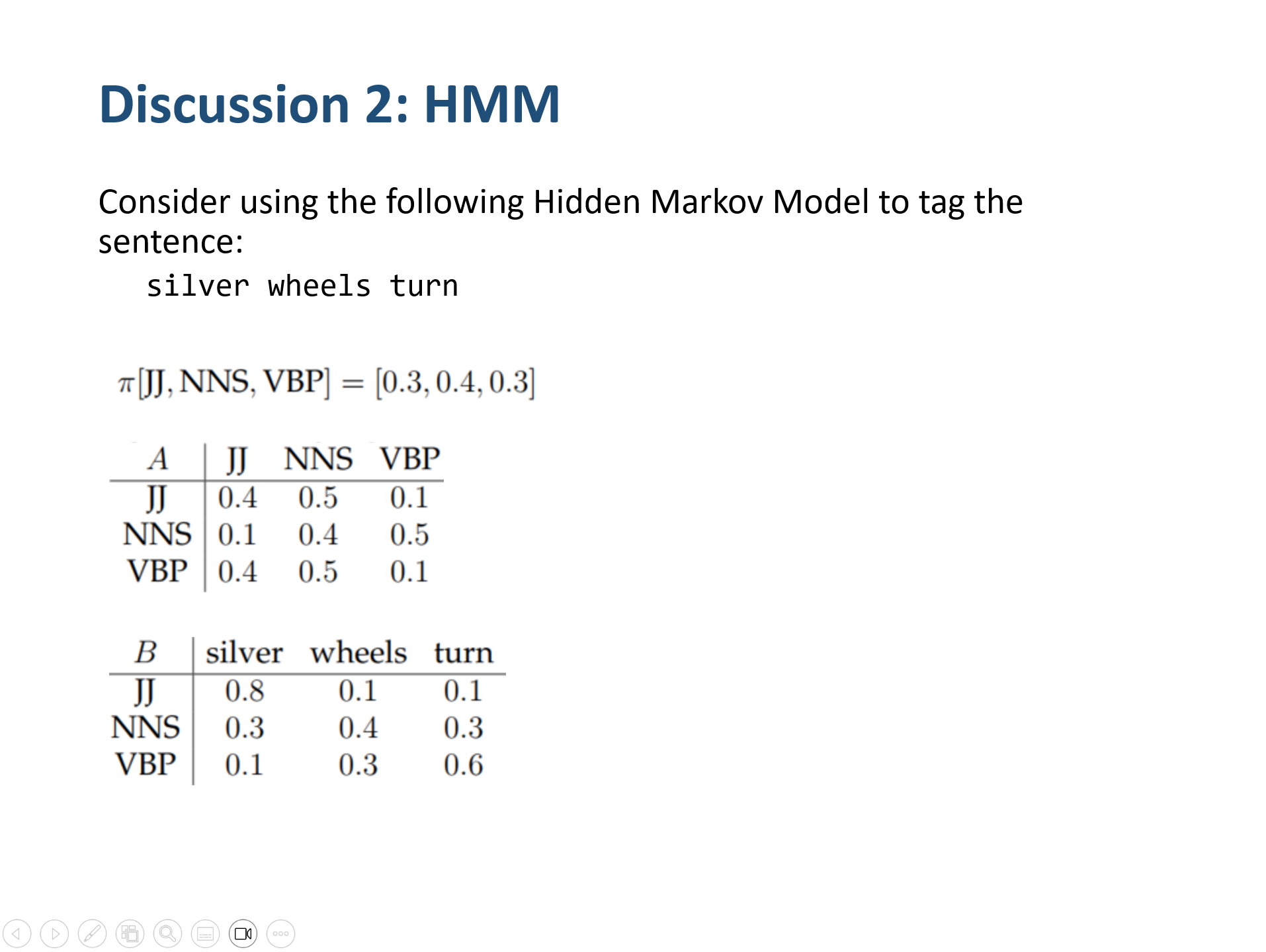
Initial state distribution:
π(JJ)=0.3,π(NNS)=0.4,π(VBP)=0.3
The transition probability matrix:
A=p(JJ∣JJ)p(JJ∣NNS)p(JJ∣VBP)p(NNS∣JJ)p(NNS∣NNS)p(NNS∣VBP)p(VBP∣JJ)p(VBP∣NNS)p(VBP∣VBP)=0.40.10.40.50.40.50.10.50.1
The emission probability matrix (with the observed vocabulary {silver, wheels, turn}) is:
p(silver∣JJ)=0.8,p(wheels∣JJ)=0.1,p(turn∣JJ)=0.1,p(silver∣NNS)=0.3,p(wheels∣NNS)=0.4,p(turn∣NNS)=0.3,p(silver∣VBP)=0.1,p(wheels∣VBP)=0.3,p(turn∣VBP)=0.6.
Viterbi Algorithm for “silver wheels turn”
Let the observation sequence be
O=(silver,wheels,turn),
and let the hidden state sequence be
(s1,s2,s3)∈{JJ,NNS,VBP}3.
Initialization (t=1, word “silver”)
δ1(JJ)δ1(NNS)δ1(VBP)=π(JJ)×p(silver∣JJ)=0.3×0.8=0.24,=π(NNS)×p(silver∣NNS)=0.4×0.3=0.12,=π(VBP)×p(silver∣VBP)=0.3×0.1=0.03.
Step 2: Recursion (t=2, word “wheels”)
δ2(s)=s′∈{JJ, NNS, VBP}max[δ1(s′)×p(s′→s)]×p(wheels∣s).
1. δ2(JJ)
δ1(JJ)×p(JJ→JJ)×p(wheels∣JJ)=0.24×0.4×0.1=0.0096δ1(NNS)×p(NNS→JJ)×p(wheels∣JJ)=0.12×0.1×0.1=0.0012δ1(VBP)×p(VBP→JJ)×p(wheels∣JJ)=0.03×0.4×0.1=0.0012
Choose the max value 0.0096, from JJ→JJ
δ2(JJ)=0.0096
2. δ2(NNS)
0.24×0.5×0.4=0.0480.12×0.4×0.4=0.01920.03×0.1×0.4=0.006
Choose the max value 0.048 , from JJ→NNS
δ2(NNS)=0.048
3. δ2(VBP)
0.024×0.1×0.3=0.00720.12×0.5×0.3=0.0180.03×0.1×0.3=0.0009
Choose max Value 0.072, from NNS→VBP
Step 3: Recursion (t=3, word “sliver”)
Same as previous one
δ3(s)=s′∈{JJ, NNS, VBP}max[δ2(s′)×p(s′→s)]×p(turn∣s).
δ3(JJ)=0.00072δ3(NNS)=0.00576δ3(VBP)=0.0144
Step 4 Termination and Backtracking
At t=3, we compare:
δ3(JJ)=0.00072,δ3(NNS)=0.00576,δ3(VBP)=0.0144
The highest probability is 0.0144 for state VBP. Backtracking the recorded predecessor states:
- At t=3, the best state is VBP.
- At t=2, the best transition leading to VBP came from NNS.
- At t=1, the best transition leading to NNS came from JJ.
which corresponds to the following tagging:
- silver → JJ
- wheels → NNS
- turn → VBP